埃莫運(yùn)動(dòng)控制驅(qū)動(dòng)器 伺服動(dòng)力頭的核心技術(shù)與應(yīng)用前景

隨著工業(yè)自動(dòng)化水平的不斷提升,埃莫(Elmo)運(yùn)動(dòng)控制驅(qū)動(dòng)器作為伺服動(dòng)力頭的關(guān)鍵組成部分,憑借其卓越的性能和廣泛的適用性,正逐漸成為現(xiàn)代制造與精密控制領(lǐng)域的核心技術(shù)之一。本文將系統(tǒng)介紹埃莫運(yùn)動(dòng)控制驅(qū)動(dòng)器的技術(shù)特點(diǎn)、工作原理及其在伺服動(dòng)力頭中的應(yīng)用,以期為相關(guān)行業(yè)的技術(shù)人員提供參考。
一、埃莫運(yùn)動(dòng)控制驅(qū)動(dòng)器的核心技術(shù)特性
埃莫運(yùn)動(dòng)控制驅(qū)動(dòng)器是一種高性能的數(shù)字伺服驅(qū)動(dòng)器,采用先進(jìn)的DSP(數(shù)字信號(hào)處理器)技術(shù),能夠在高精度、高動(dòng)態(tài)響應(yīng)的場(chǎng)景下實(shí)現(xiàn)精確的電機(jī)控制。其主要技術(shù)特性包括:
1. 高精度控制:埃莫驅(qū)動(dòng)器支持多軸同步控制,配合高分辨率編碼器,可實(shí)現(xiàn)微米級(jí)別的定位精度,適用于精密加工、半導(dǎo)體制造等高要求領(lǐng)域。
2. 動(dòng)態(tài)響應(yīng)快:驅(qū)動(dòng)器內(nèi)部的先進(jìn)算法能夠快速響應(yīng)負(fù)載變化,確保電機(jī)在高速運(yùn)動(dòng)時(shí)仍能保持穩(wěn)定,有效減少過(guò)沖和振蕩。
3. 模塊化設(shè)計(jì):埃莫驅(qū)動(dòng)器采用緊湊型模塊化結(jié)構(gòu),便于集成到各類(lèi)設(shè)備中,同時(shí)支持多種通信協(xié)議(如EtherCAT、CANopen等),實(shí)現(xiàn)與上位機(jī)系統(tǒng)的高效數(shù)據(jù)交換。
4. 強(qiáng)大的保護(hù)功能:內(nèi)置過(guò)流、過(guò)壓、過(guò)熱等多重保護(hù)機(jī)制,確保設(shè)備在復(fù)雜工況下的安全運(yùn)行。
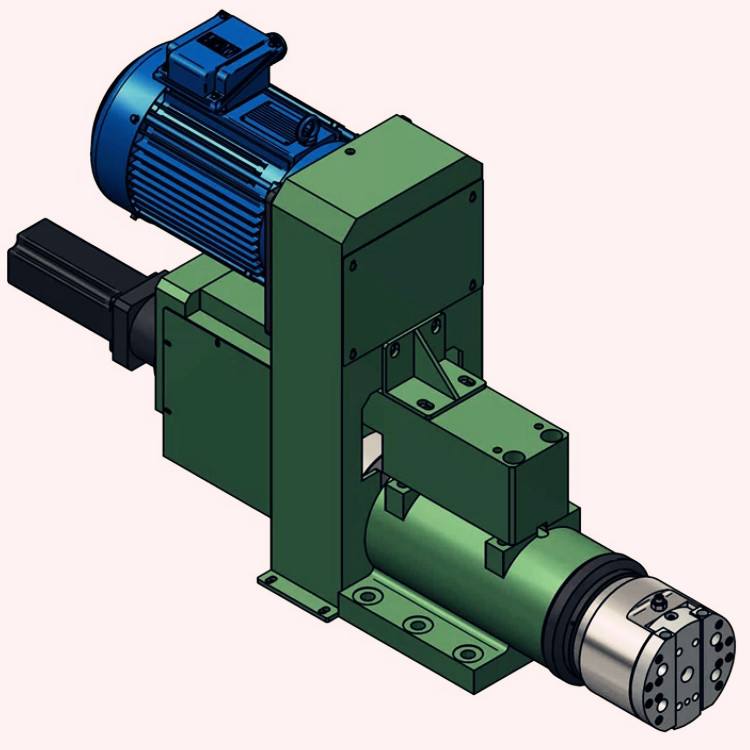
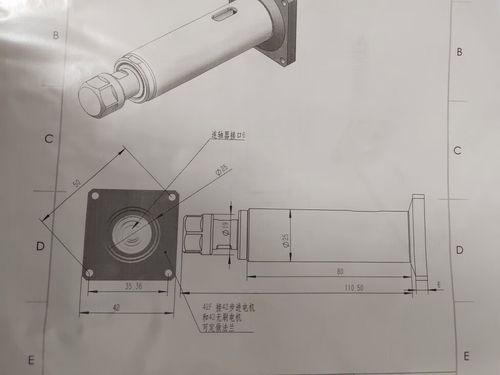
二、伺服動(dòng)力頭的工作原理與埃莫驅(qū)動(dòng)器的結(jié)合
伺服動(dòng)力頭是一種集成了伺服電機(jī)、減速機(jī)構(gòu)和控制單元的模塊化裝置,廣泛應(yīng)用于機(jī)床、機(jī)器人、自動(dòng)化生產(chǎn)線(xiàn)等設(shè)備中。其核心功能是將電能轉(zhuǎn)化為精確的機(jī)械運(yùn)動(dòng),而埃莫運(yùn)動(dòng)控制驅(qū)動(dòng)器則在這一過(guò)程中扮演“大腦”角色。
1. 信號(hào)處理與反饋:埃莫驅(qū)動(dòng)器通過(guò)接收來(lái)自上位控制系統(tǒng)的指令信號(hào),結(jié)合伺服電機(jī)內(nèi)置的編碼器反饋,實(shí)時(shí)調(diào)整輸出電流和電壓,確保電機(jī)按照預(yù)設(shè)軌跡運(yùn)行。
2. 動(dòng)態(tài)補(bǔ)償與優(yōu)化:在高速或變負(fù)載工況下,埃莫驅(qū)動(dòng)器能夠通過(guò)內(nèi)置的PID算法和先進(jìn)濾波技術(shù),對(duì)位置、速度和力矩進(jìn)行動(dòng)態(tài)補(bǔ)償,顯著提升系統(tǒng)的穩(wěn)定性和精度。
3. 多軸協(xié)同:在復(fù)雜的自動(dòng)化系統(tǒng)中,埃莫驅(qū)動(dòng)器支持多軸聯(lián)動(dòng)控制,使伺服動(dòng)力頭能夠?qū)崿F(xiàn)復(fù)雜的運(yùn)動(dòng)軌跡,如圓弧插補(bǔ)、直線(xiàn)加減速等。
三、埃莫運(yùn)動(dòng)控制驅(qū)動(dòng)器在伺服動(dòng)力頭中的應(yīng)用案例
1. 數(shù)控機(jī)床:在高速加工中心中,埃莫驅(qū)動(dòng)器驅(qū)動(dòng)的伺服動(dòng)力頭能夠?qū)崿F(xiàn)刀具的快速定位和精細(xì)切削,大幅提升加工效率和表面質(zhì)量。
2. 工業(yè)機(jī)器人:機(jī)器人的關(guān)節(jié)驅(qū)動(dòng)通常采用伺服動(dòng)力頭,埃莫驅(qū)動(dòng)器通過(guò)高響應(yīng)控制,確保機(jī)器人在抓取、搬運(yùn)等任務(wù)中動(dòng)作流暢、定位精準(zhǔn)。
3. 半導(dǎo)體設(shè)備:在晶圓切割、封裝等精密工序中,埃莫驅(qū)動(dòng)器配合伺服動(dòng)力頭,實(shí)現(xiàn)了納米級(jí)的位置控制,保障了產(chǎn)品的高成品率。
四、未來(lái)發(fā)展趨勢(shì)
隨著工業(yè)4.0和智能制造的深入推進(jìn),埃莫運(yùn)動(dòng)控制驅(qū)動(dòng)器正朝著更智能化、網(wǎng)絡(luò)化、集成化的方向發(fā)展。未來(lái),其與人工智能、物聯(lián)網(wǎng)技術(shù)的結(jié)合將進(jìn)一步拓展伺服動(dòng)力頭的應(yīng)用邊界,例如通過(guò)預(yù)測(cè)性維護(hù)算法優(yōu)化設(shè)備壽命,或借助云端數(shù)據(jù)實(shí)現(xiàn)遠(yuǎn)程監(jiān)控與調(diào)試。
埃莫運(yùn)動(dòng)控制驅(qū)動(dòng)器作為伺服動(dòng)力頭的核心控制單元,以其高精度、高可靠性和靈活的集成能力,正成為推動(dòng)工業(yè)自動(dòng)化升級(jí)的重要力量。對(duì)于從事自動(dòng)化設(shè)備研發(fā)與維護(hù)的工程師而言,深入理解其技術(shù)原理與應(yīng)用場(chǎng)景,將有助于提升系統(tǒng)設(shè)計(jì)的整體水平。
參考文獻(xiàn)
[1] Elmo Motion Control. Technical Documentation for Servo Drives. 2022.
[2] 劉明, 張華. 現(xiàn)代伺服系統(tǒng)與運(yùn)動(dòng)控制技術(shù). 機(jī)械工業(yè)出版社, 2020.
[3] 陳志剛, 李偉. 工業(yè)機(jī)器人伺服驅(qū)動(dòng)技術(shù)的發(fā)展趨勢(shì). 《自動(dòng)化技術(shù)與應(yīng)用》, 2021, 40(3): 45-49.
如若轉(zhuǎn)載,請(qǐng)注明出處:http://www.kssdvcf.cn/product/583.html
更新時(shí)間:2026-01-09 04:53:48